Системы дистанционного управления строительными машинами
Волков Е.А., Севрюгина Н.С. Белгородский государственный технологический университет им. В.Г. Шухова
Обоснование применения систем дистанционного управления строительными машинами при работе в тяжёлых условиях или агрессивных средах.
В современном мире в последнее время стали особенно актуальными вопросы эргономики и проблемы безопасной работы человека в технологической системе "человек-техника-среда". Поэтому, в значительной степени они стали определять развитие техники, начиная со стадии проектирования и конструирования, при производстве, и заканчивая испытаниями и эксплуатацией машин и механизмов, систем их управления. Это вызвано тем, что деятельность человека в условиях стремительного развития научно-технического прогресса, становится с каждым днём всё более напряжённой, и связана со всё более сложной техникой.
Объективным фактом стало то, что уменьшается надёжность исполнения работником-оператором усложняющихся функций. В связи с этим, показатель надёжности системы "человек-машина" становится ограниченным из-за самого человека, а повышение надёжности технической составляющей системы начинает терять смысл...
Выполняя работу на пределе своих физиологических и психических возможностей, особенно в неблагоприятной или даже опасной производственной среде, человек может допустить ошибки, которые в условиях современного производственного процесса могут стать критическими. Как показывает статистика, неправильные действия операторов в зарегистрированных случаях аварийных ситуаций вызваны не низкой квалификацией или недостаточной подготовкой, а из-за несоответствия между возможностями человека и конструктивными параметрами технических устройств.
В настоящее время всё более высокие требования предъявляются к ремонтным, диагностическим, поверочным и профилактическим работам, проводимым на различных территориях в тяжелых условиях эксплуатации, как для техники, которая подвергается агрессивному воздействию и быстро выходит из строя, так и для операторов. Среда в зоне проведения работ может быть различной, и зачастую безопасное выполнение работ возможно только при условии не нахождения человека на территории данного производства (работы на зараженных территориях, в условиях низкой или высокой температуры, потенциально опасные территории: с возможностью схода лавин, оползней, разбор завалов). Создание новых систем управления техникой позволит снизить нагрузку на психическое и физическое состояние человека, предоставив оператору оптимальные условия работы, полностью соответствующие его возможностями. Одним из перспективных вариантов решения данной проблемы может стать применение специализированных технологических средств, с соответствующей аппаратурой обеспечивающей дистанционное управление оборудованием и безусловное контролирование процесса проведения работ.
В качестве примера строительной техники принят гусеничный экскаватор (построена трехмерная модель). Интегрированная система дистанционного управления будет определяться следующими признаками:
Рабочее оборудование экскаватора можно рассматривать как роботизированную стрелу с тремя степенями свободы относительно осей стрелы, рукояти и ковша. При управлении оператор осуществляет процесс перемещения каждого из указанных рабочих элементов экскаватора, одновременно включаются устройства, обеспечивающие обратную связь по силовым воздействиям, действующим на ковш и каждый исполнительный механизм. Работа этих механизмов согласована с работой системы управления (Master-Slave). Благодаря системе Master-Slave осуществляется контроль перемещений рабочих элементов экскаватора и передача сигналов регистрации перемещений элементов каждого из рабочих органов, на основании которых получают фактические данные об их перемещениях.
Система Master-Slave состоит из подсистем:
- подсистема Master - реализует прямой контроль рабочих органов машины.
- подсистема Slave - обеспечивает приложение рабочих усилий соответственно кинематическим схемам рабочего оборудования и используемой системы обратной связи. В этом случае существенную помощь в управлении всеми системами экскаватора оказывают информационные средства, обеспечивающие регистрацию значений силовых нагрузок в процессе выполнения работ (Рис.1). Отсутствие цепи обратной связи в системе привело бы к тому, что усилия, приложенные, например, к ковшу, оператор не чувствовал.
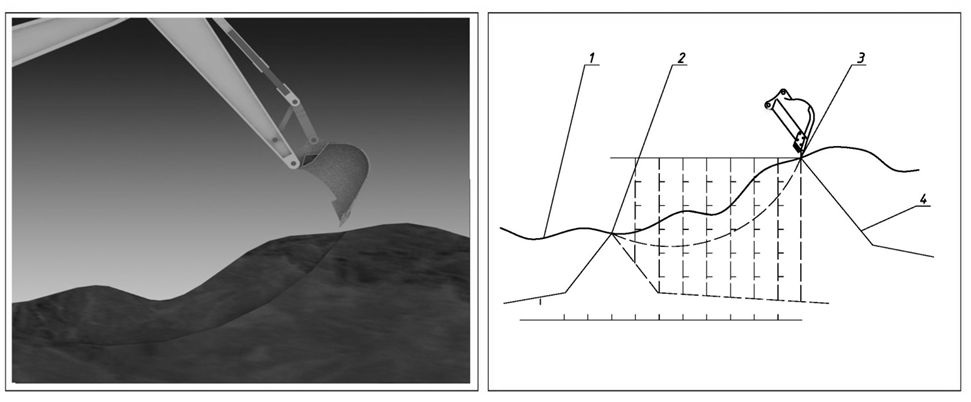
Рис.1. Схема механизма регистрации неровностей рельефа и получения контактной информации: 1 - уровень грунта; 2 и 3 - первая и вторая точки контактирования; 4 - предполагаемая линия движения.
При использовании СДУ (Систем Дистанционного Управления) оператор может определить условия проведения работ, осматривая зоны ведения работ, что способствует повышению эффективности эксплуатации оборудования. Также возможно использование дополнительных камер, и информации, считываемой с компьютеров. Изображение зон проведения работ реализуется при использовании 3D моделей, что в свою очередь расширяет возможности мониторинга за технической системой в целом.
Дистанционные системы со связью по радиоканалу обладают недостатком, заключающемся в том, что для их бесперебойного функционирования необходим широкий частотный диапазон. Это связано со способностью обеспечивать устойчивую и независимую связь без искажений и существенных помех с каждым из роботов. Перспективным путём развития исследований в этом направлении представляется применение лазерных каналов связи для передачи управляющих команд и мониторинга информации между роботизированной строительной техникой и её оператором. На данном этапе очень важно рациональное распределение потоков информации между лазерным и радио каналом.
Дано обоснование сложности обеспечения эффективного выполнения технологических процессов строительными машины без учета "человеческого" фактора.
Установлено, что проблема использования строительных машин при ликвидации чрезвычайных ситуаций, работе в условиях агрессивных сред, прочих тяжелые условиях сложно контролируемых оператором может быть решена введением системы дистанционного управления с выводом оператора из зоны отрицательного воздействия среды.
Эффективность различных систем управления с установкой дополнительных элементов контроля технологического процесса на строительных машинах проверяется путем разработки компьютерной модели для системы "человек - техника - среда" с выполнением ее многофакторного анализа.
<< Износостойкость лопастей гравитационного бетоносмесителя | Конструкции монтажных агрегатов для строительства мостов >>
| На главную | Архив: информация, материалы |